Havish Netla
Computer science student at Georgia Tech.

Click to view my resume.
Georgia Tech
Selected completed credits
- CS 1301 - Introduction to Computing
- MATH 1551 - Differential Calculus
- MATH 1552 - Integral Calculus
- PHYS 2211 - Intro Physics I
Expected coursework for 2022-23 school year
- CS 1331 - Introduction to Object Oriented Programming
- CS 1332 - Data Structures and Algorithms for Applications
- MATH 1554 - Linear Algebra
- CS 2050 - Introduction to Discrete Mathematics for Computer Science
- PSYC 1101 - General Psychology
Work Experience
Internet Education Foundation (Congressional App Challenge)
March 2020 - September 2020
Find sponsors to fund the Congressional App Challenge. Create sponsorship material. Create educational CS material for 5000+ students (AWS, Microsoft Azure, Cryptography, Swift). Work on expanding App Challenge to areas without computers. Write introductions for Members of Congress and compile potential sponsors from 338 Members of Congress.
C-HIT
Summer 2020
Developed a ticketing tool to allow employees to submit suggestions and complaints to the corporate office. Ticketing tool created using React, MongoDB, and JavaScript. Work with other interns to design app and get feedback from employees. Learn how to work in a corporate environment.
Robotics
Click for more information
CASE STUDY
Organizations
MRHS Computer Science Club
2019 - 2022
Start one of the largest clubs at MRHS (130+ members). Create a club curriculum. Organize participation in competitions. Run CS Classes to teach JavaScript, Java, and CS Fundamentals. Manage Officers and Mentors. Liaison with Club sponsor and school's National Honor Society. Manage club website.
MDHacks
2020 - 2022
Direct an international hackathon with 186 people from 20 countries on 6 continents. Create effective sponsorship and promotional materials. Manage finances, apply for grants, and seek out corporate sponsors. Advertise hackathon to target demographic on Devpost and other social media platforms.
Delta V
2018 - 2022
Lead development of machine learning subsystems. Design apps using industry standard UI design tools. Present apps to corporate judges, and industry experts including an angel investor and Forbes 30 under 30 member. Improve existing programming knowledge by learning new technologies and languages to implement at hackathons.
Data Visualizations
Click for more information
VISUALIZATIONS
Featured Projects
LEGO Robotics Scoring Apps
2019-2022
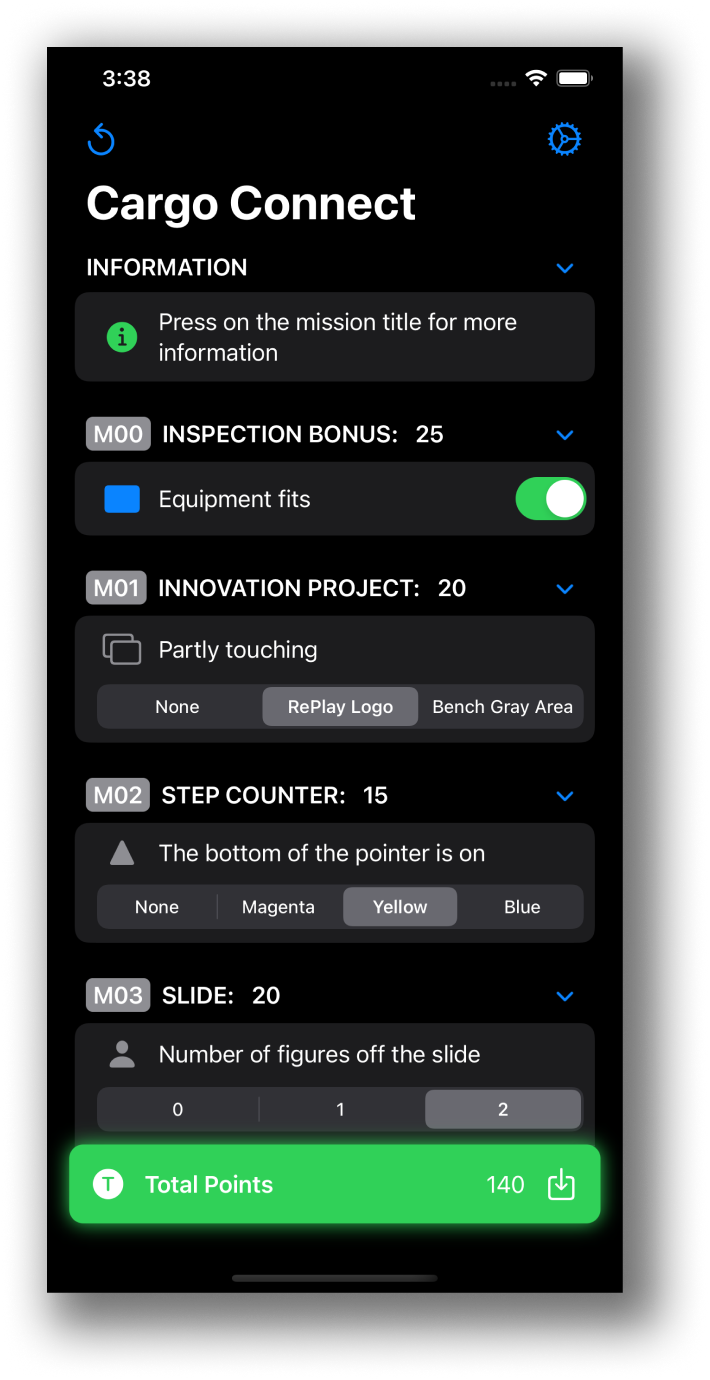
30,000+
DOWNLOADS
I created two LEGO Robotics scorer iOS apps. The apps were developed using XCode and Swift, and I published the apps to AppStore. I also marketed the apps to many international coach groups and responded to feedback.
TooLegalDidntRead
May 2020
 1st Place
1st PlaceTooLegalDidntRead is an app to solve the growing problem of long and complex legally binding documents by using NLP and keyword extraction to create a shortened version of a legal document that outlines your rights, as well as your legal limitations. This makes sure the company can not make you agree to anything you didn't want to agree to. The software also analyzes US Federal law, Case Law, and State law to find relevant law that applies to your terms of service.
Supply Smart
April 2020
1st Place of 140 University TeamsDeep learning natural language processing based supply and demand analysis and prediction of essential items displayed on a personalized and intuitive web application.
InsightAI
September 2019
Top 10 out of 240 college level teamsBest hack that helped the communityDeep learning live object and depth recognition with binaural AR audio spatialization and text-to-speech to help the visually impaired see the world with sound using only a smartphone and headphones.
News451
March 2019
1st PlaceNews 451 is a minimalistic web application that allows users to see the recent news without clutter or ads. Users can gauge reliability and bias of their news using a custom trained machine learning model.
Technical Skills
Javascript
Node.js
Java
Python
Kotlin
React
React Native
Rust
Tensorflow
Machine Learning
Express
OpenCV
Robotics
UI/UX
Systems Engineering
iOS Development
Android Development
GIS
Image Gallery
A collection of my favorite pictures/graphics I have taken or created